发展海洋经济,可以弥补陆地资源的不足,是解决当今世界资源匮乏、空间紧张、环境恶化等问题的有效途径。认知海洋,进行有效的环境数据收集,是发展海洋经济的前提。通过在水下部署多种类型的传感器设备,构建水声传感网对水域进行环境感知与数据收集,能够有效提高环境感知能力,节省人力物力。然而,水声传感网在实际应用中面临着一系列难题,如网络拓扑动态性导致的系统设备间协同难度大、网络载体驱动性不足情况下路径循迹精度低及水下开放环境导致的数据可靠性差等。
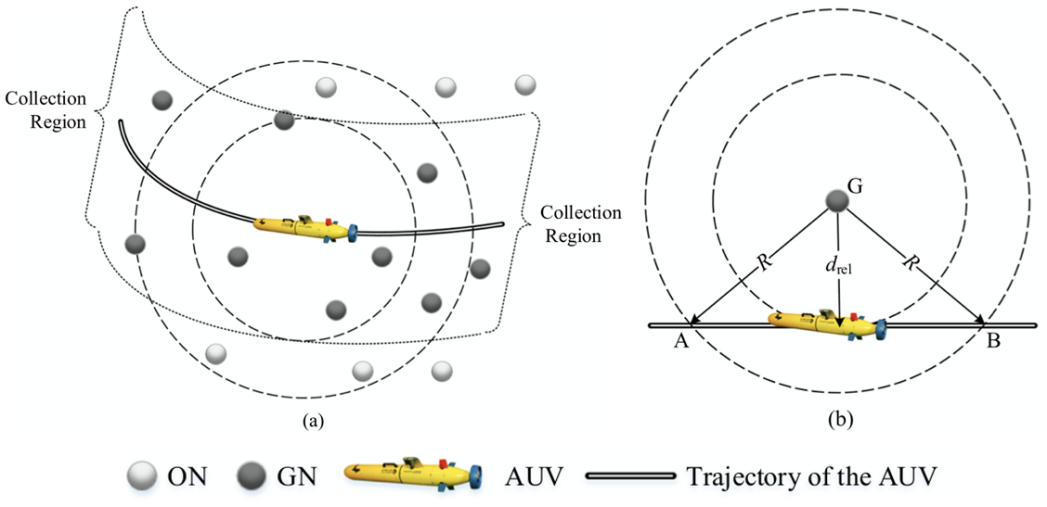
图1 AUV移动轨迹与通信时间分配的关系
近期,河海大学信息学部物联网工程学院韩光洁团队面向水下数据高效感知与收集的重大需求和科学问题,创新提出了基于异构设备协同的水下数据收集方案。针对水声传感网在数据收集过程中面临的高能耗和耗能不均问题,提出一种基于AUV(Autonomous Underwater Vehicle)位置预测的数据收集算法。AUV按照设定的轨迹在网络中航行,并对轨迹附近的节点数据进行收集。为了克服“热区”问题,设计一种轨迹调整机制,周期性地对轨迹进行调整,并提出一种可靠的时间分配机制来保证节点和AUV之间的有效通信时长。
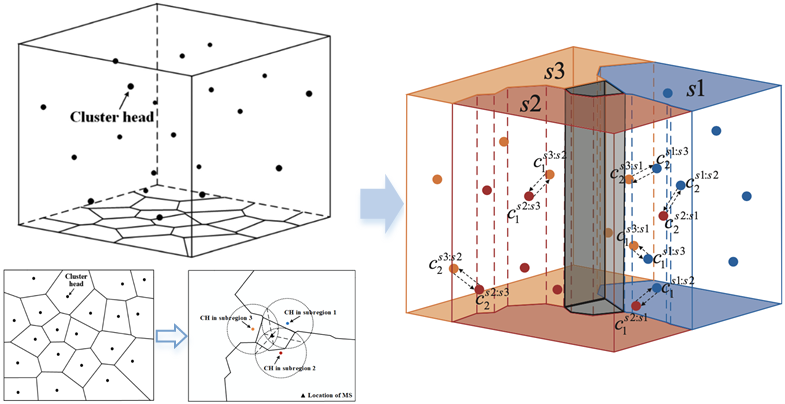
图2 高可用数据采集方案示例
在保障采集数据可用性方面,提出基于多自主水下航行器的高可用性数据收集算法,通过预设的航行器收集轨迹和灵活的故障发现与修复机制来确保网络在突发性故障情形下的正常运行,进而提高了网络性能并保证了数据采集服务的高可用性。
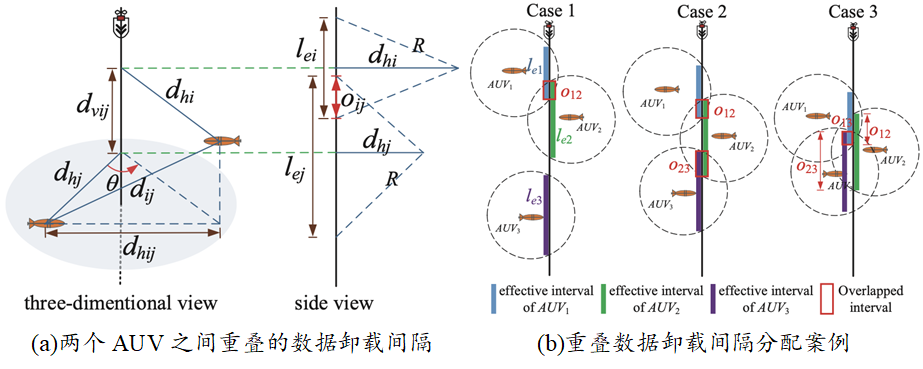
图3 基于泰森多边形的区域划分算法示例
针对多AUV协同数据收集场景下的负载不均衡以及自发性紧急状况处理机制缺失的问题,韩光洁教授团队提出一种基于区域划分的事件动态竞争数据收集算法。该算法利用泰森多边形实现合理的区域分割,完成了多个AUV之间的粗粒度任务分配问题;在子区域中,利用强化学习算法实现了细粒度的数据收集路径规划,并集合动态事件竞争处理机制保证了常规数据收集任务与紧急事件处理之间的平衡。
图4 基于时隙分配的AUV数据卸载示例
为降低水声通信长时延和不稳定性对AUV之间信息交互的影响,进一步提升多AUV协作数据收集的效率,韩光洁团队提出了一种基于AUV状态预测的数据收集算法。通过位于不同收集区域内的节点簇之间的信任共享,实现不同区域内AUV之间的状态预测。根据状态预测的结果,使用启发式策略更新各区域内AUV的路径,并设计一种数据转发调度机制合理分配AUV和移动sink之间重叠的数据卸载间隔来减少AUV的下潜次数,以延长AUV的工作时长。
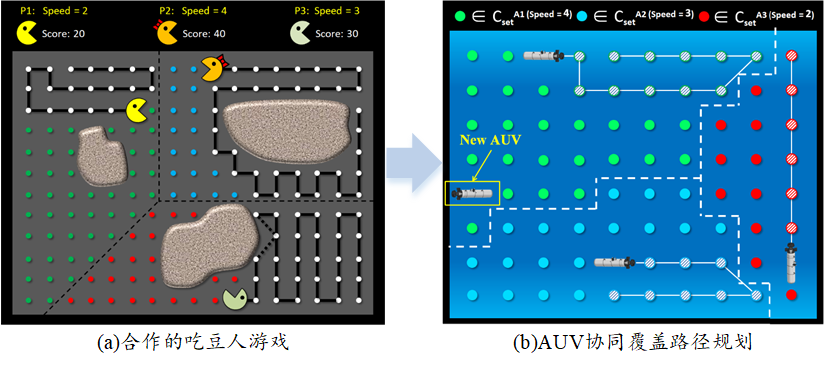
图5 基于Pac-Man游戏的AUV协作覆盖路径规划
在水底协作覆盖探测方面,韩光洁团队受Pac-Man游戏的启发,提出一种AUV协作覆盖路径规划算法。首先是基于点扩展的任务分配,由每个AUV离散执行,并且支持可靠的水下信息共享。另一个步骤是基于虚拟吸引力的覆盖路径规划,采用来自Pac-Dots的虚拟吸引力,使得生成覆盖路径的计算复杂度低并能有效规避障碍物。
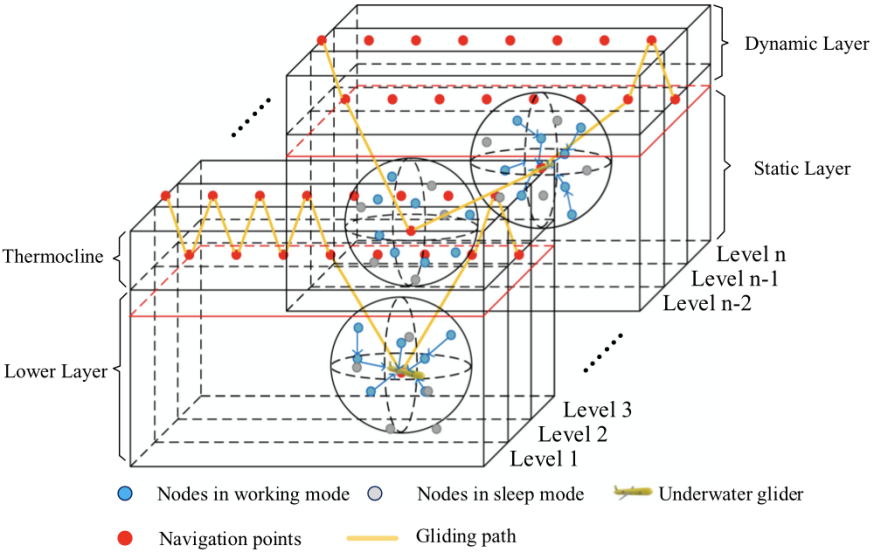
图6 基于动态分层的水下滑翔机数据收集方案示例
近年来,随着水下滑翔机这类轻装备的发展,利用轻装备提升水声传感器网络数据收集效率的研究也逐渐被关注。韩光洁团队设计了一种用于水下滑翔机的分层数据收集算法。该方案基于埃克曼漂流效应将网络分为动态层和静态层。在动态层,利用基于虚拟立方体的多跳方法将数据包传输到中心区域。在静态层,采用改进的基于密度的聚类技术将每个节点分配到适当的集群,而水下滑翔机从集群头节点收集数据。
上述成果发表在《IEEE Transactions on Mobile Computing》《IEEE Transactions on Wireless Communications》《IEEE Transactions on Intelligent Transportation Systems》《IEEE Transactions on Vehicular Technology》《IEEE Internet of Things Journal》等计算机网络领域顶级期刊上。
(上下滑动查看更多)
本文来源:河海大学